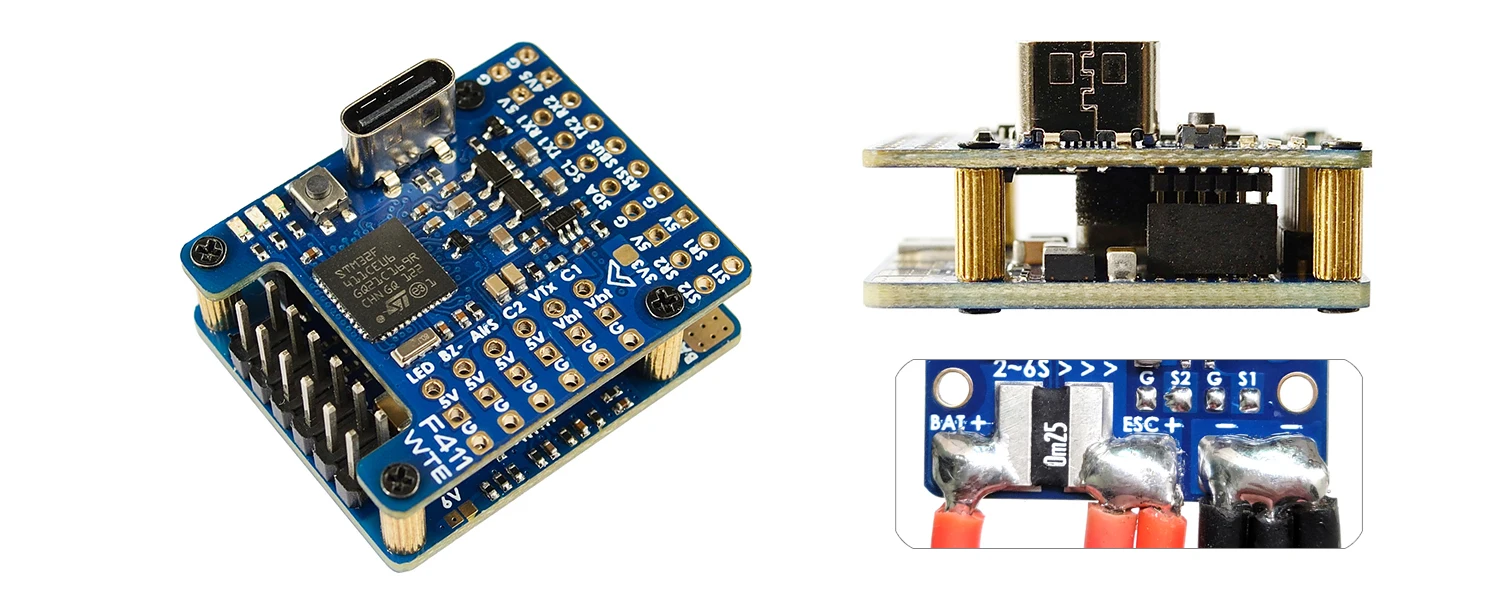
Especificaciones FC
IMU: BMI270 (SPI)



 El tiene INAV fw 4.1.0 precargado para QC
Comience con INAV5.0, el objetivo MatekF411TE aparecerá en el Configurador INAV.
Descargue el firmware de INAV 4.x. X desde nuestro sitio web (haga clic en el botón «Firmwares» en la esquina superior derecha)
El firmware pre-flasheado INAV4.1.0 en el momento de la llegada es exactamente idéntico al firmware descargado de nuestro sitio web. Ahora no hay ningún firmware más nuevo. Lo que debe hacer es simplemente escribir CLI «defaults» para revertir todos los parámetros al valor predeterminado.
El tiene INAV fw 4.1.0 precargado para QC
Comience con INAV5.0, el objetivo MatekF411TE aparecerá en el Configurador INAV.
Descargue el firmware de INAV 4.x. X desde nuestro sitio web (haga clic en el botón «Firmwares» en la esquina superior derecha)
El firmware pre-flasheado INAV4.1.0 en el momento de la llegada es exactamente idéntico al firmware descargado de nuestro sitio web. Ahora no hay ningún firmware más nuevo. Lo que debe hacer es simplemente escribir CLI «defaults» para revertir todos los parámetros al valor predeterminado. 









 Amount to Pay$ 0
Amount to Pay$ 0
You must scan the QR code, click continue to attach the screenshot (it is the only proof of payment) and you will be able to complete the purchase.